Arbeitsmarkt
Fachkräftemangel & Kostendruck
Dem Bau fehlen Fachkräfte, und der Druck wächst mit jedem Jahr. Automatisierung wird zur Notwendigkeit – nicht zum Luxus.
Das Link-Ökosystem
Link verbindet die BIM-Planung mit der robotergestützten Ausführung auf der Baustelle – über ein offenes Datenformat, eine Koordinations-Infrastruktur und eine modulare Roboter-Plattform.
Frühe Entwicklungsphase · Konzept-Demonstrator
Warum Link
Der Bau in der DACH-Region automatisiert sich – aber ohne gemeinsame Basis zersplittert diese Automatisierung. Link setzt dort an.
Arbeitsmarkt
Dem Bau fehlen Fachkräfte, und der Druck wächst mit jedem Jahr. Automatisierung wird zur Notwendigkeit – nicht zum Luxus.
Standardisierung
Heute baut jeder Roboterhersteller seine eigene Schnittstelle zu BIM. Ohne gemeinsamen Standard entstehen über Jahre Dutzende inkompatible Insellösungen.
Zugang
Wer einen Bauprozess automatisieren will, muss zuerst eine sichere mobile Plattform entwickeln – ein sechsstelliger Aufwand. Viele sinnvolle Anwendungen entstehen deshalb nie.
Ökosystem
Statt dass jeder Hersteller Format, Protokoll und Plattform neu erfindet, schlagen wir eine gemeinsame Grundlage vor.
Link Format
Ein offenes Format für Arbeitsaufträge in der Baurobotik – als Erweiterung von IFC. Kompatibel mit jedem BIM-Werkzeug, das IFC exportiert.
Entwurf v0.1 in Arbeit
Link Server
Infrastruktur für die Baustelle (Cloud + vor Ort): verteilt Aufgaben, verfolgt den Status und koordiniert mehrere Roboter – auf Basis von ROS2.
In Entwicklung
Link Chassis
Eine mobile Plattform mit Navigation, Energie und Sicherheitsarchitektur. Dritthersteller montieren ihr Werkzeug über standardisierte Schnittstellen.
Prototyp · auf CE-Konformität ausgelegt
Link Engineering
Aufbereitung von BIM-Modellen für die Ausführung: aus Ihrem Modell wird eine Link-fertige Version mit angereicherten Arbeitsdaten.
Früher Service-Baustein
Architektur in Entwicklung
Aktueller Stand
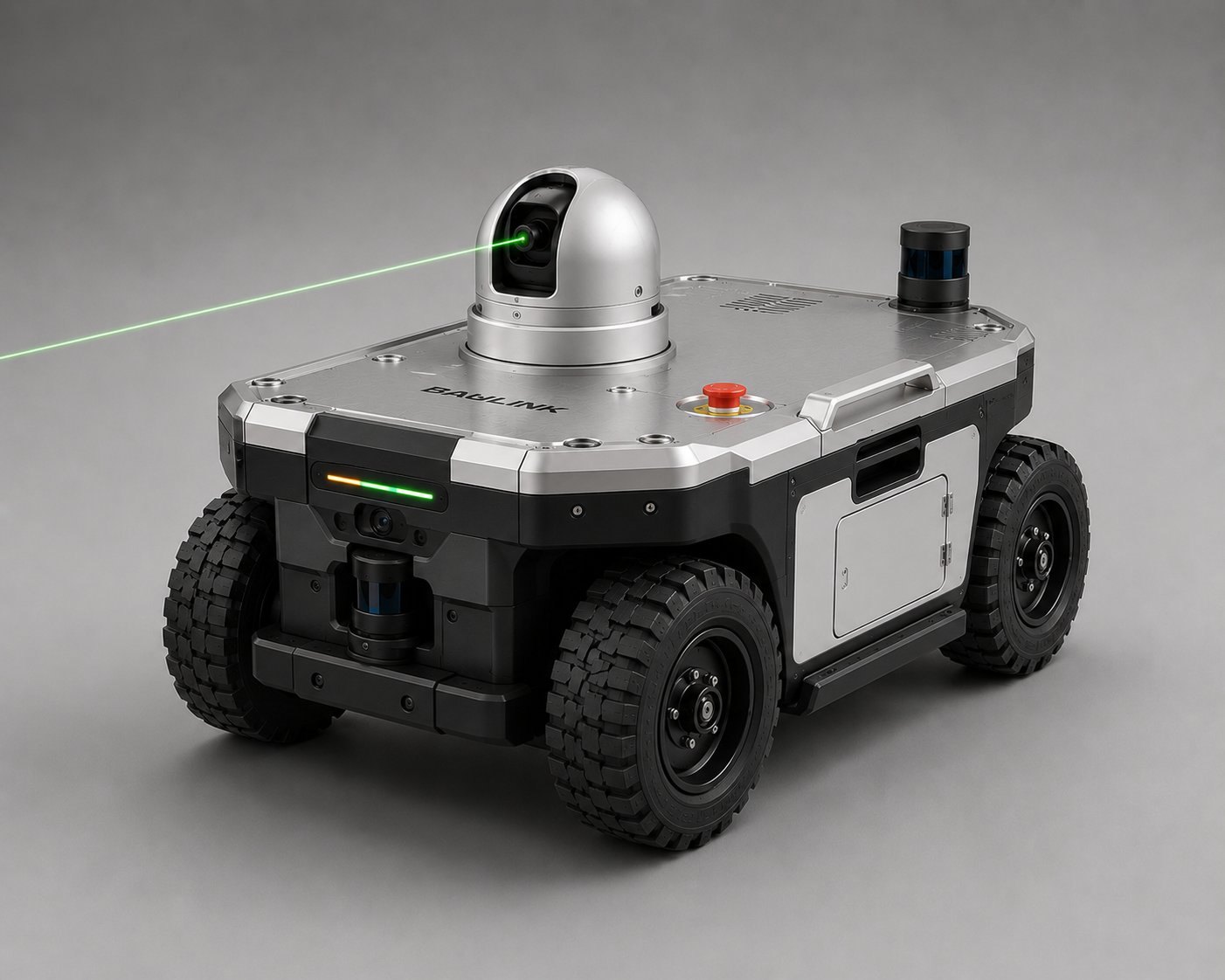
Robot 2 — Markierungs-Roboter
Unser aktueller Demonstrator: überträgt Positionen aus dem BIM-Modell als physische Markierung auf die Baustelle – aufgebaut auf einem Ackermann-Chassis. Das Flaggschiff, das zeigt, was Link ermöglicht.
Robot 3 — Follow-Me-Roboter geplant
Ein zweiter Prototyp auf einer anderen Plattform – als Beleg, dass Link unabhängig vom einzelnen Roboter funktioniert.
Offen & IFC-kompatibel
Link ist als offener Standard angelegt – nicht proprietär. Das Link Format erweitert IFC über PropertySets (z. B. Pset_LinkArbeit) und ergänzt bestehende Standards, statt mit ihnen zu konkurrieren.
Diese Ausrichtung folgt der Philosophie von buildingSMART. Wer heute schon mit IFC arbeitet, soll Link ohne Bruch nutzen können.
Über
Baulink entsteht in Deutschland, mit Fokus auf den Bau im DACH-Raum.
Aktuell ein von einer Person getragenes, eigenfinanziertes Projekt in einer frühen Konzeptphase – mit Erfahrung aus BIM/Revit und Robotik. Wir bauen Schritt für Schritt und kommunizieren offen, wo wir stehen.
Kontakt
Drei Wege, mit uns in Kontakt zu treten: